ext_calib
SHOW EXTRINSIC RESULTS
Contents
check for calibration data
if ~exist('show_camera'), show_camera = 1; end; if ~exist('n_ima')|~exist('fc'), fprintf(1,'No calibration data available.\n'); return; end; if ~exist('do_gui','var') do_gui = 1; end %check_active_images; if n_ima ~= 0, if ~exist(['omc_' num2str(ind_active(1))]), fprintf(1,'No calibration data available.\n'); return; end; end; %if ~exist('no_grid'), no_grid = 0; %end; if n_ima ~= 0, if ~exist(['n_sq_x_' num2str(ind_active(1))]), no_grid = 1; end; else no_grid = 1; end; if ~exist('alpha_c'), alpha_c = 0; end; if 0, err_std = std(ex'); fprintf(1,'\n\nCalibration results without principal point estimation:\n\n'); fprintf(1,'Focal Length: fc = [ %3.5f %3.5f]\n',fc); fprintf(1,'Principal point: cc = [ %3.5f %3.5f]\n',cc); fprintf(1,'Distortion: kc = [ %3.5f %3.5f %3.5f %3.5f]\n',kc); fprintf(1,'Pixel error: err = [ %3.5f %3.5f]\n\n',err_std); end; % Color code for each image: colors = 'brgkcm';
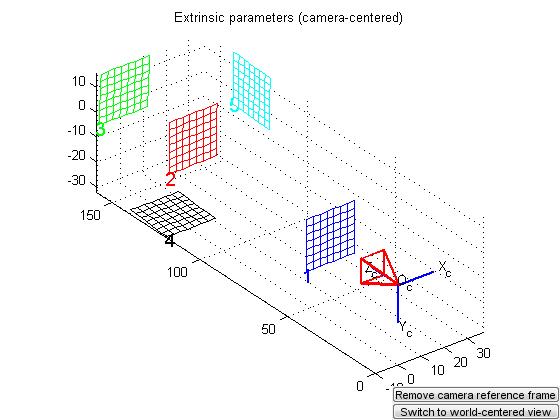
Show the extrinsic parameters
if n_ima ~= 0, if ~exist('dX'), eval(['dX = norm(Tc_' num2str(ind_active(1)) ')/10;']); dY = dX; end; else dX = 1; end; fprintf('dX = %g\n',dX);
dX = 3
IP = 5*dX*[1 -alpha_c 0;0 1 0;0 0 1]*[1/fc(1) 0 0;0 1/fc(2) 0;0 0 1]*[1 0 -cc(1);0 1 -cc(2);0 0 1]*[0 nx-1 nx-1 0 0 ; 0 0 ny-1 ny-1 0;1 1 1 1 1]; IP BASE = 5*dX*([0 1 0 0 0 0;0 0 0 1 0 0;0 0 0 0 0 1]); IP = reshape([IP;BASE(:,1)*ones(1,5);IP],3,15); fprintf('nx %d ny %d\n',nx,ny); if ishandle(4), figure(4); [a,b] = view; else figure(4); a = 50; b = 20; end;
IP = -4.8850 5.0432 5.0432 -4.8850 -4.8850 -5.4762 -5.4762 4.4604 4.4604 -5.4762 15.0000 15.0000 15.0000 15.0000 15.0000 nx 640 ny 640
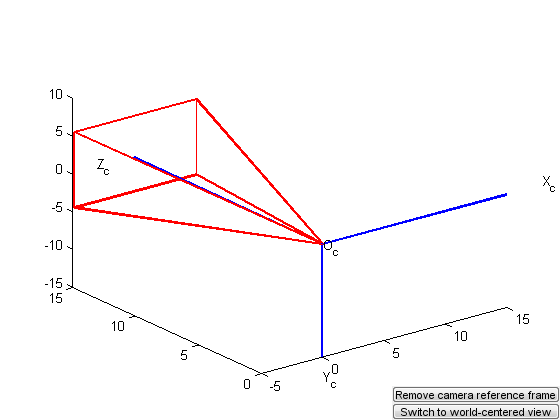
show camera
if show_camera, figure(4); plot3(BASE(1,:),BASE(3,:),-BASE(2,:),'b-','linewidth',2); hold on; plot3(IP(1,:),IP(3,:),-IP(2,:),'r-','linewidth',2); text(6*dX,0,0,'X_c'); text(-dX,5*dX,0,'Z_c'); text(0,0,-6*dX,'Y_c'); text(-dX,-dX,dX,'O_c'); else figure(4); clf; hold on; end;
show targets
for kk = 1:n_ima, if active_images(kk); if exist(['X_' num2str(kk)]) & exist(['omc_' num2str(kk)]), eval(['XX_kk = X_' num2str(kk) ';']); if ~isnan(XX_kk(1,1)) eval(['omc_kk = omc_' num2str(kk) ';']); eval(['Tc_kk = Tc_' num2str(kk) ';']); N_kk = size(XX_kk,2); if ~exist(['n_sq_x_' num2str(kk)]), no_grid = 1; else eval(['n_sq_x = n_sq_x_' num2str(kk) ';']); if isnan(n_sq_x(1)), no_grid = 1; end; end; if ~no_grid, eval(['n_sq_x = n_sq_x_' num2str(kk) ';']); eval(['n_sq_y = n_sq_y_' num2str(kk) ';']); if (N_kk ~= ((n_sq_x+1)*(n_sq_y+1))), no_grid = 1; end; end; if ~isnan(omc_kk(1,1)), R_kk = rodrigues(omc_kk); YY_kk = R_kk * XX_kk + Tc_kk * ones(1,length(XX_kk)); uu = [-dX;-dY;0]/2; uu = R_kk * uu + Tc_kk; if ~no_grid, YYx = zeros(n_sq_x+1,n_sq_y+1); YYy = zeros(n_sq_x+1,n_sq_y+1); YYz = zeros(n_sq_x+1,n_sq_y+1); YYx(:) = YY_kk(1,:); YYy(:) = YY_kk(2,:); YYz(:) = YY_kk(3,:); %keyboard; figure(4); hhh= mesh(YYx,YYz,-YYy); set(hhh,'edgecolor',colors(rem(kk-1,6)+1),'linewidth',1); %,'facecolor','none'); %plot3(YY_kk(1,:),YY_kk(3,:),-YY_kk(2,:),['o' colors(rem(kk-1,6)+1)]); text(uu(1),uu(3),-uu(2),num2str(kk),'fontsize',14,'color',colors(rem(kk-1,6)+1)); else figure(4); plot3(YY_kk(1,:),YY_kk(3,:),-YY_kk(2,:),['.' colors(rem(kk-1,6)+1)]); text(uu(1),uu(3),-uu(2),num2str(kk),'fontsize',14,'color',colors(rem(kk-1,6)+1)); end; end; end; end; end; end;
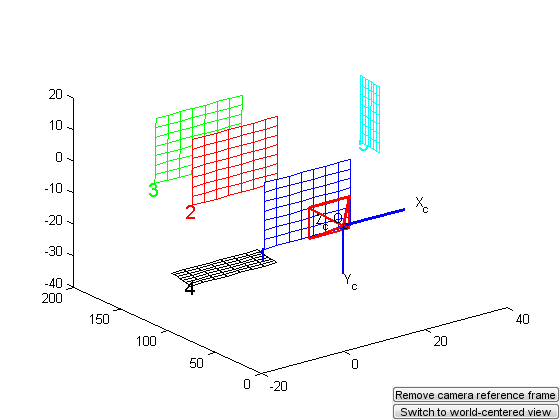
figure(4);rotate3d on; axis('equal'); title('Extrinsic parameters (camera-centered)'); %view(60,30); view(a,b); grid on; hold off; axis vis3d; axis tight; set(4,'color',[1 1 1]); if ~show_camera, xlabel('X_c'); ylabel('Z_c'); zlabel('<-- Y_c'); end; set(4,'Name','3D','NumberTitle','off'); %fprintf(1,'To generate the complete movie associated to the optimization loop, try: check_convergence;\n'); if exist('h_switch2')==1, if ishandle(h_switch2), delete(h_switch2); end; end; if n_ima ~= 0 && do_gui if show_camera, h_switch2 = uicontrol('Parent',4,'Units','normalized', 'Callback','show_camera=0;ext_calib;', 'Position',[1-.30 0.04 .30 .04],'String','Remove camera reference frame','fontsize',8,'fontname','clean','Tag','Pushbutton1'); else h_switch2 = uicontrol('Parent',4,'Units','normalized', 'Callback','show_camera=1;ext_calib;', 'Position',[1-.30 0.04 .30 .04],'String','Add camera reference frame','fontsize',8,'fontname','clean','Tag','Pushbutton1'); end; end; if exist('h_switch','var')==1, if ishandle(h_switch), delete(h_switch); end; end; if n_ima ~= 0 && do_gui h_switch = uicontrol('Parent',4,'Units','normalized', 'Callback','ext_calib2', 'Position',[1-.30 0 .30 .04],'String','Switch to world-centered view','fontsize',8,'fontname','clean','Tag','Pushbutton1'); end; figure(4); rotate3d on;