ECE 564 Computer Vision Assignment 1
Images for this assignment may be downloaded from
cv1.zip.
Submit your work through Isidore. Include an HTML document called index.html
giving an overall summary of your answers and links to published MATLAB documentation where appropriate.
Include all MATLAB code and images referenced in the MATLAB code.
- Use
impixel to find the color of the mouse's
pants, shirt, ribbon, and face in the image below. Use the full-scale image in
the zipped resources above. Generate an image of the
mouse with the four sample locations marked. Generate another image showing the colors
as four 50 x 50 colored boxes.

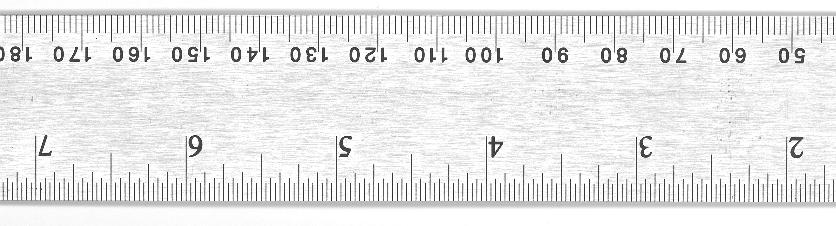
- Use the imdistline command in Matlab to determine the image
resolution (pixels per inch) of xruler.tif
as accurately as possible. The image below is a reduced version
of xruler.tif.
- Find the resolution (pixels per meter) and linear field-of-view
of the urban image cup_chip.tif
(shown below) using features such as the football field or tennis
court which have well-known dimensions.

- Find the resolution (pixels per meter) and linear field-of-view
of the image parked_cars.jpg at the distance of the license plates.
(shown below) using features such as the width of the parking spots or the
size of the license plates (see Ohio plates) which have well-known dimensions.

- Use
imcrop on the original of the above image to extract and display several of the license plates
and identify the license plate number (text format). Also extract, display, and identify the bumper
sticker on one of the cars.
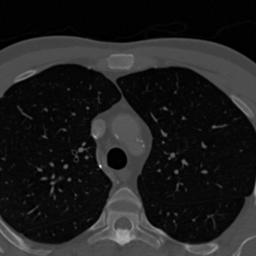
- Use
improfile to obtain cross-sections through bones in the medical image IM14.png in cv1.zip.
Note that if img = imread('IM14.png') is used to read the image, you will need imshow(img,[]) to display it.
Maintained by John Loomis,
last updated 14 Jan 2020